For all applications of distributed MIMO, tight synchronization is required between the nodes' local oscillators in the face of frequency offset and drift. Frequency synchronization can be achieved from periodic feedback broadcast by a designated node, however, one-shot frequency estimation with the accuracy required for DMIMO applications generally requires a long measurement epoch, increasing feedback overhead. Phase estimation, on the other hand, can be done accurately in a short measurement interval with high accuracy, therefore obtaining accurate frequency estimates from phase-only measurements can greatly decrease the feedback overhead.
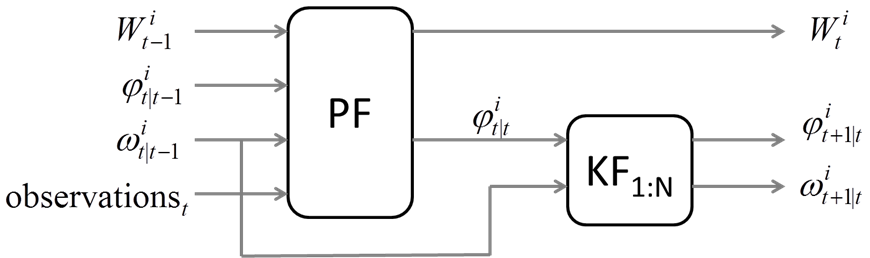
To provide accurate frequency measurements, the unwrapped phase change, i.e. the number of full 2π rotations, between consecutive measurements is needed whereas only wrapped measurements are available. In our proposed method, a Rao-Blackwellized particle filter is used to evaluate the number of full 2π rotations that the offset signal undergoes between measurements. In this framework, a particle filter is used for the nonlinear portion of the state, i.e. finding the number of full 2π rotations, while a Kalman filter (attached to each particle) is used for estimation of the linear space, i.e. tracking the frequency offset from the unwrapped phase measurements.
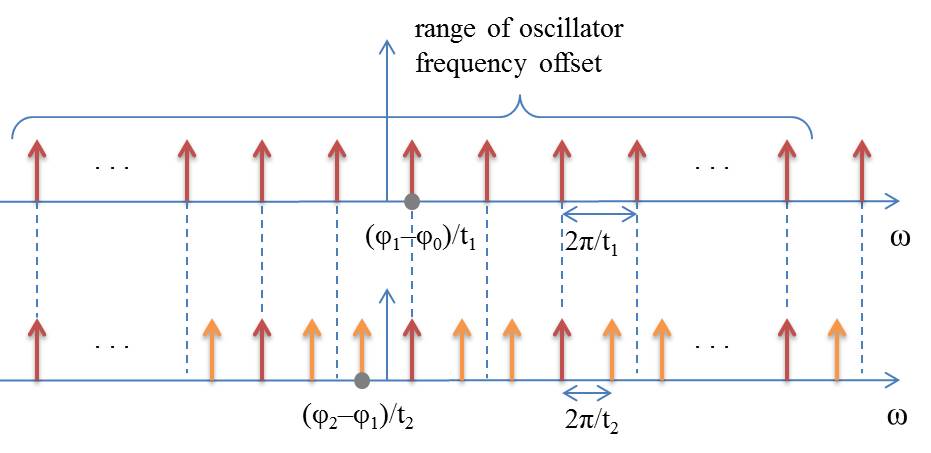
In this method, frequency aliasing is managed by changing the time between feedback bursts as shown in Figure 2. By changing the feedback period in each burst, the phase prediction of different particles are separated in the wrapped phase span of –π to π and the correct hypothesis for unwrapped phase and frequency can be singled out as shown below.